Xingyu Liu, Pengfei Ren*, Jingyu Wang, Haifeng Sun, Qi Qi, Zirui Zhuang, Jianxin Liao
State Key Laboratory of Networking and Switching Technology, Beijing University of Posts and Telecommunications
Abstract
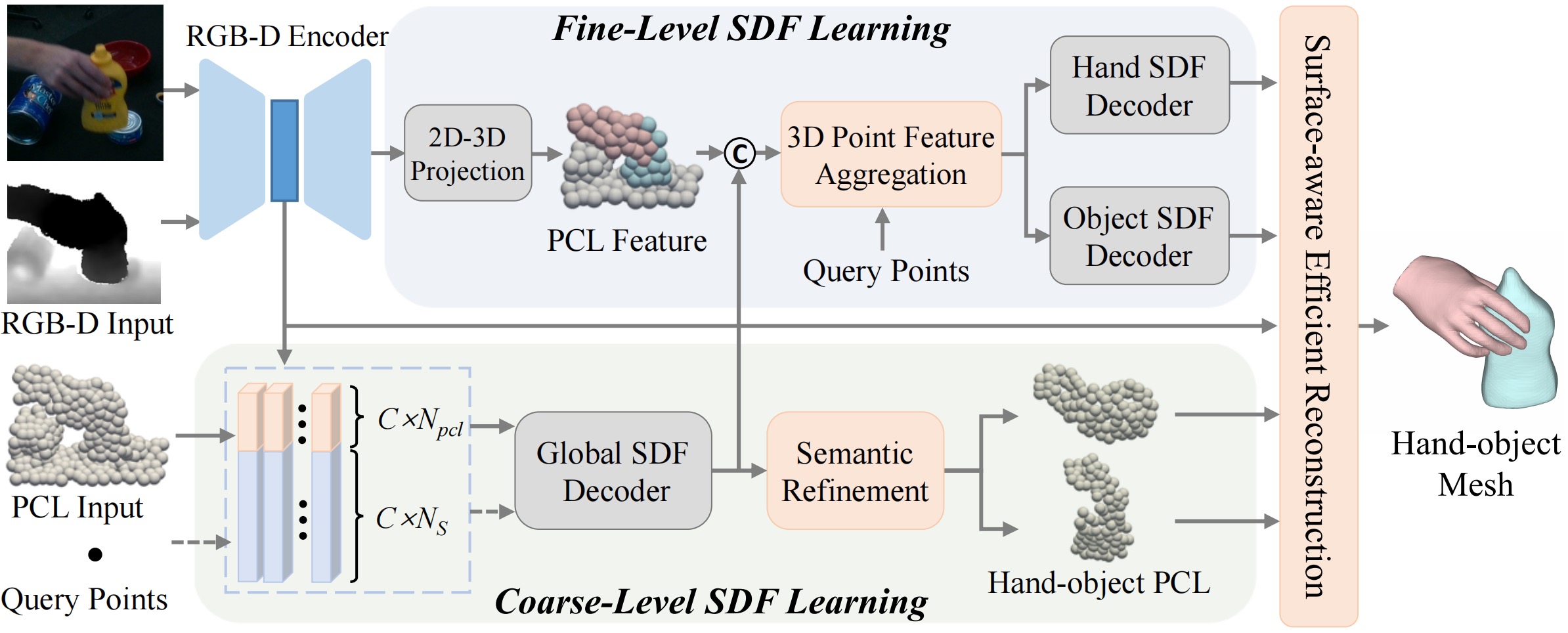
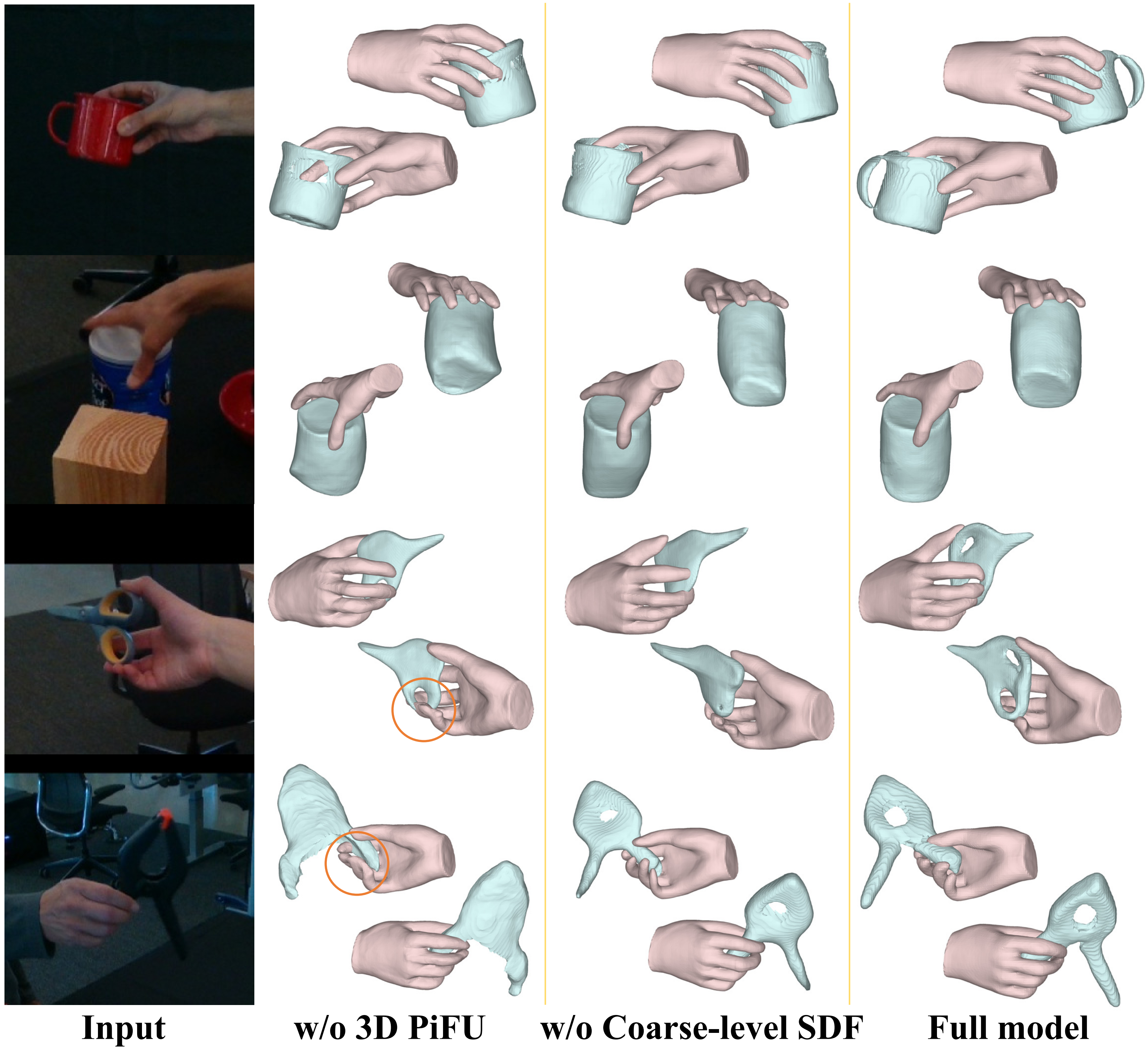
Recent research has explored implicit representations, such as signed distance function (SDF), for interacting hand-object reconstruction. SDF enables modeling hand-held objects with arbitrary topology and overcomes the resolution limitations of parametric models, allowing for finer-grained reconstruction. However, directly modeling detailed SDFs from visual clues presents challenges due to depth ambiguity and appearance similarity, especially in cluttered real-world scenes. In this paper, we propose a coarse-to-fine SDF framework for 3D hand-object reconstruction, which leverages the perceptual advantages of RGB-D modality in visual and geometric aspects, to progressively model the implicit field. Specifically, we model a coarse SDF for visual perception of overall scenes. Then, we propose a 3D Point-Aligned Implicit Function (3D PIFu) for fine-level SDF learning, which leverages both local geometric clues and the coarse-level visual priors to capture intricate details. Additionally, we propose a surface-aware efficient reconstruction strategy that sparsely performs SDF query based on the hand-object semantic priors. Experiments on two challenging hand-object datasets show that our method outperforms existing methods by a large margin.
Overview
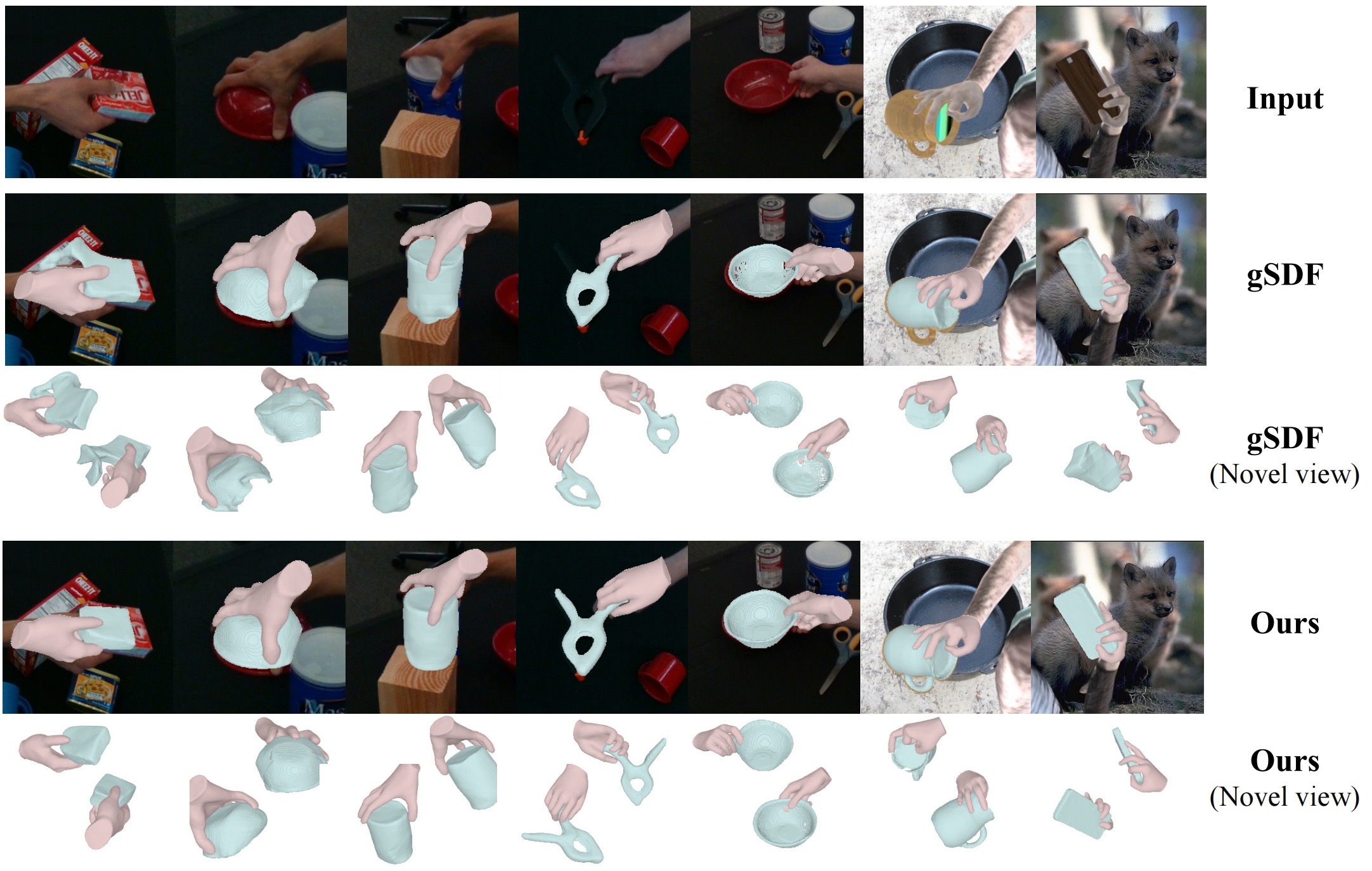
Comparison with Baseline
Input Image
Ours
Ours
gSDF
gSDF

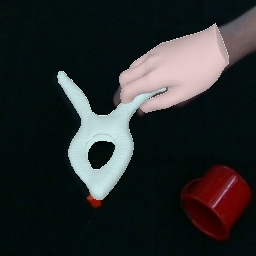
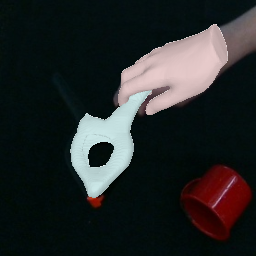


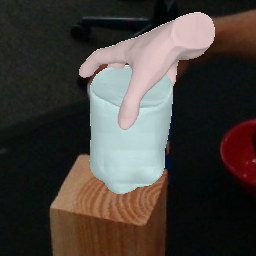


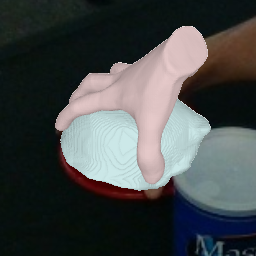

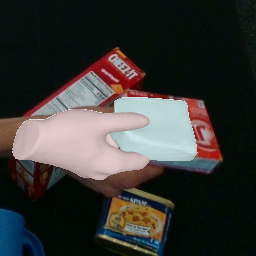
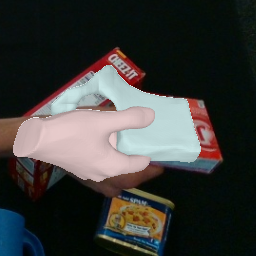


Result

Bibtex
@inproceedings{liu2025coarse,
title={Coarse-to-Fine Implicit Representation Learning for 3D Hand-Object Reconstruction from a Single RGB-D Image},
author={Liu, Xingyu and Ren, Pengfei and Wang, Jingyu and Qi, Qi and Sun, Haifeng and Zhuang, Zirui and Liao, Jianxin},
booktitle={European Conference on Computer Vision},
pages={74--92},
year={2025},
organization={Springer}
}